
EESC-USP
Drones equipped with swarm robotics systems could be used to monitor borders, locate environmental disasters, and perform a range of tasks according to their programmingEESC-USPInspired by the teamwork of social insects such as ants, bees, and termites, and the formation of birds in flight and schools of fish, swarm robotics is a field of study looking for the best ways for robots to exchange information and act together as a unit to achieve a common goal. These computer solutions are being studied by a number of research groups around the world. There are not yet any commercial examples, but swarm robotics is intended for use both indoors and outdoors, including at sea, inspecting and repairing submarine platforms and performing maritime surveillance, and in the air, with drones programmed to monitor borders, for example.
Although the concept has existed since the 1980s, this branch of robotics only began to advance at the beginning of this decade through the evolution of electronic engineering and computing, smaller and more powerful electronic circuits, improved wireless communication, cheaper robot hardware, and superior artificial intelligence systems.
“This type of technology is getting cheaper and cheaper, but a lot more research and development is needed if we want to see robot swarms on the market in the near future,” says electrical engineer Marco Terra, coordinator of the Brazilian National Science and Technology Institute for Autonomous Cooperative Systems (INSAC), based at the University of São Paulo’s São Carlos School of Engineering (EESC-USP). “It is essential that sensors and other components become cheaper if this category of robots is to come into popular use.”

ISCTE-IUL
Experiment involving a group of robot-boats on the river Tejo, Portugal, testing systems for collective actions such as homing, clustering, and dispersionISCTE-IULIn October this year, the US Army Research Laboratory announced a major five-year project in this field, worth US$27 million. Led by the University of Pennsylvania, a group of researchers is attempting to develop autonomous, intelligent, and resilient teams of robots with a range of skills, to work alongside human beings searching for and rescuing hostages, gathering intelligence after terrorist attacks, providing assistance after natural disasters, and supporting humanitarian missions in areas of conflict. The project also involves the Massachusetts Institute of Technology (MIT), the Georgia Institute of Technology (Georgia Tech), the University of Southern California (USC), the University of California, San Diego, and the University of California, Berkeley.
In a joint announcement by the institutions participating in the project, the researchers explain that searches for missing people are performed as a group, and with swarm robotics, if any of the machines are damaged, the rest of the group can reconfigure and reorganize themselves in order to continue working together, even with no GPS signal or cloud access. Each robot works with the others toward a common goal, but each can perform different tasks and assume different roles as needed throughout the mission.
One of the largest swarm robotics experiments took place at the Wyss Institute for Biologically Inspired Engineering at Harvard University, and was published in Science in 2014. The study involved a total of 1,024 microrobots called kilobots, which are just a few centimeters tall, easy to assemble, and widely used in robotics experiments. Under the leadership of electrical engineer Michael Rubenstein, now at Northwestern University, the researchers were able to program the robots to exchange messages between each other—similar to the way ants and bees touch each other to exchange information along their path or flight—using infrared light, forming shapes as a unit, such as a star or the letter K. Each robot was programmed to participate in the formations based only on the information transmitted by its neighbors.
 “The problem-solving abilities of the robots provides an opportunity to utilize machine learning, where the machine is programmed to recognize the environment and everything around it,” explains computer scientist Esther Luna Colombini, a professor at the University of Campinas Computing Institute (IC-UNICAMP) and former president of the Robocup in Brazil, an annual international robotics competition. Machine learning is a technique that allows computers to learn from patterns and process information while learning from experience. “They can ‘learn’ while performing a task. The scope of what robots can achieve in any given situation is huge,” Terra explains.
“The problem-solving abilities of the robots provides an opportunity to utilize machine learning, where the machine is programmed to recognize the environment and everything around it,” explains computer scientist Esther Luna Colombini, a professor at the University of Campinas Computing Institute (IC-UNICAMP) and former president of the Robocup in Brazil, an annual international robotics competition. Machine learning is a technique that allows computers to learn from patterns and process information while learning from experience. “They can ‘learn’ while performing a task. The scope of what robots can achieve in any given situation is huge,” Terra explains.
“They are capable of learning with very little information. Each robot can identify a bottle of Coca-Cola in a house, for example, without being explicitly programmed to do so. They just have to search for the image on the internet, and then they can recognize it,” says Colombini, who is also a member of the Robotics and Automation Society (RA Society), which is part of the American Institute of Electrical and Electronic Engineers (IEEE). She notes that swarm technology is not commonly used in robotics competitions, especially robot soccer, because usually each player is programmed for predetermined tasks rather than to act as part of a group. “It is possible to simulate team strategies involving behaviors and actions that the robots have not been programmed to perform, thus changing tactics during the game, but it is not the norm in these competitions.”
Swarm robots are often cheaper and structurally simpler than the humanoids with heads, bodies, legs, and arms portrayed by the media. In swarm robotics, the machines need several sensors and are designed to fulfill a specific purpose. Depending on the location, they move around using continuous track or multidirectional wheels, or they take the form of small boats or flying drones.

HARVARD UNIVERSITY
A Harvard University experiment involving 1,024 mini-robotsHARVARD UNIVERSITYWorking at sea
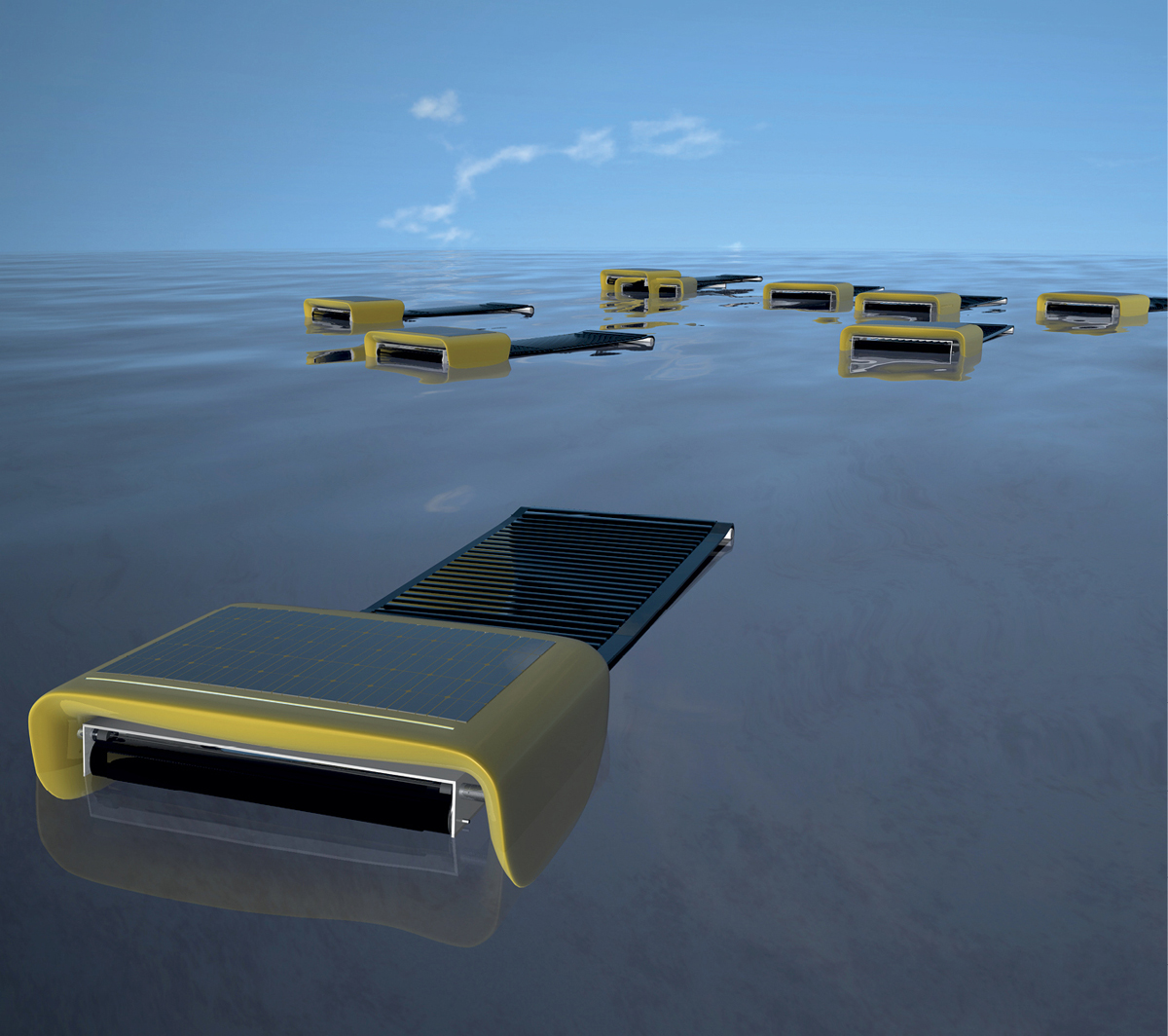
Two experiments have demonstrated the potential of swarm robotics for use in aquatic environments. MIT’s Seaswarm project involves autonomous robots, 4.8 meters long by 2.1 meters wide, working together to remove oil from the sea surface, primarily in estuaries and bays. They are powered by solar energy, which is generated by photovoltaic panels installed on top of the robot, enabling them to stay at sea for several days without having to return to shore. A conveyor belt attached to the robot collects oil from the surface, and when the belt returns to the head of the robot, the oil is released and stored until the machine returns to shore or delivers it to a nearby collection boat (see picture). Proposed in 2010, the Seaswarm project has not yet been developed as a commercial product.
In Portugal, researchers from the University Institute of Lisbon (ISCTE-IUL) and other institutions have experimented with small, 60-centimeter boats, to study how robotic swarms could operate in real conditions. Ten robot-boats were used, at a cost of €300 each, on a lake that is fed by the Tagus River in Lisbon. In a 2016 article published in PLOS ONE, they showed how the control systems evolve in four collective tasks performed by the aquatic robots: homing, dispersion, clustering, and monitoring. Each task was tested independently to verify the robustness of the algorithms developed by the researchers. The objective is to use the robotic swarm for environmental monitoring and surveillance services.
The major challenge in swarm robotics is improving the robot behavior systems. “We need to study the messages the robots send each other—usually by wi-fi, bluetooth, or radio waves—when performing a certain task,” says Nadia Nedjah, a professor in the School of Engineering at the State University of Rio de Janeiro (UERJ).
MIT
Above, MIT computer simulation of aquatic robots removing oil from the sea surfaceMIT“We are conducting basic research using a computer to form clusters of 40 to 70 individual robots that group together without knowing each other beforehand. One of the experiments is to circumvent obstacles by forming triangles with three robots. They should move together like a formation of birds in flight, which requires conversation between one another. According to the data, they make decisions based on the needs of the task and the group,” explains Nedjah. In a study completed in 2016 and published in the International Journal of Bio-Inspired Computation, she evaluated an algorithm developed by the group for situations where a robot needs the assistance of others to perform a task. Called the wave algorithm, the recruitment process works by passing infrared messages between neighboring robots until it finds one or more that can help. “The hardware and software technologies both exist already, but everything is still in the experimental phase,” says Nedjah.
One of the topics of study at INSAC, which encompasses six other Brazilian universities and three research institutes, is aerial swarm robotics for agricultural applications. “We are studying the use of robotic swarms for crop dusting. With this system, each drone knows the area it has sprayed. If one runs out of product or has technical problems, the others can do the work in their place, without the need for any human input,” Terra explains. “Swarm robotics still has a long way to go, and Brazil is ready to compete for the small niches that are forming in this area, like agriculture.”
Terra also notes that developments in this field of robotics may impact autonomous cars, which could also function as a swarm. “When there are many autonomous vehicles on the road, they will need to talk to each other to make decisions. At an intersection with no traffic lights, for example, they will need to decide who safely goes first using sensors and algorithms in embedded computing systems,” says Terra.
Project
INCT 2014 – Brazilian National Science and Technology Institute for autonomous cooperative systems applied to security and the environment (No. 14/50851-0); Grant Mechanism Thematic Project; Program INCT; Principal Investigator Marco Henrique Terra (USP); Investment R$2,234,701.20.
Scientific article
SILVA JÚNIOR, L. D. R. S. and NEDJAH, N. Distributed strategy for robot recruitment in swarm-based systems. International Journal of Bio-Inspired Computation. Published online on March 4, 2016.