
Inspirándose en la organización de los insectos sociales, tales como las hormigas, abejas y termitas, y en la formación de los cardúmenes de peces y bandadas de aves en vuelo, la robótica de enjambres es un campo de estudio que estudia los mejores caminos computacionales para que los robots puedan intercambiar información entre sí y actuar en conjunto, de acuerdo con un objetivo común para el cual fueron programados. Se trata de soluciones computacionales que conforman el campo de estudio de varios grupos de investigadores en el mundo. Si bien todavía no hay ejemplos a nivel comercial, la robótica de enjambres ofrece perspectivas de uso tanto en sitios cerrados como abiertos, como por ejemplo en el mar, para la inspección y la reparación de plataformas submarinas y en el monitoreo marítimo y aéreo, con drones dotados de sistemas para vigilar las fronteras.
Aunque a nivel conceptual esto ya existía desde la década de 1980 en Estados Unidos, recién a comienzos de esta década, con la evolución de la ingeniería electrónica y de la computación, con circuitos electrónicos menores y más potentes, sumado a las bondades de la comunicación inalámbrica y el montaje de robots baratos, además de la implementación de sistemas de inteligencia artificial, ese campo de la robótica pudo lograr avances.
“Este tipo de tecnología es cada vez más barato, aunque aún no es suficiente y se requiere de una gran labor investigativa y de desarrollo para que los enjambres de robots puedan comercializarse en un futuro no muy lejano”, analiza el ingeniero electricista Marco Terra, coordinador del Instituto Nacional de Ciencia y Tecnología (INCT) para Sistemas Autónomos Cooperativos (InSAC), cuya sede funciona en la Escuela de Ingeniería de São Carlos, en la Universidad de São Paulo (EESC-USP). “Esta categoría de robots, para popularizarse, depende fundamentalmente del abaratamiento de los sensores y otros componentes”.

ISCTE-IUL
Experimento con un grupo de barcos robots en el río Tajo, en Portugal, realiza ensayos de sistemas para labores colectivas tales como localización, agrupamiento y dispersiónISCTE-IULEl Laboratorio de Investigación del Ejército de Estados Unidos anunció en octubre de este año un gran proyecto en esa área, que tendrá una duración de cinco años, con una inversión de 27 millones de dólares. Con el liderazgo de la Universidad de Pensilvania, un grupo de investigadores se propone desarrollar equipos autónomos, inteligentes y adaptables de robots con diferentes habilidades para trabajar en conjunto con humanos en la búsqueda y rescate de rehenes, recopilación de información después de ataques terroristas, en casos de desastres naturales y en el apoyo a misiones humanitarias en áreas de conflicto. También forman parte del proyecto el Instituto de Tecnología de Massachusetts (MIT), el Instituto de Tecnología de Georgia (Georgia Tech), la Universidad del Sur de California y las universidades de California en San Diego y Berkeley.
En el anuncio conjunto de las instituciones participantes del proyecto, los investigadores explican que la búsqueda de personas desaparecidas se realiza en grupo y la robótica de enjambres prevé que, si algunas de las máquinas quedaran dañadas, las demás pueden reconfigurarse y reorganizarse para proseguir desempeñándose en conjunto, incluso sin señal de GPS o conexión con la nube informática. Cada robot trabaja junto a los otros con un objetivo común, pero cada uno puede tener asignada una tarea diferente e incluso pueden asignársele otras funciones en el curso de la misión, según las necesidades.
Uno de los mayores experimentos en robótica de enjambres se realizó en el Instituto Wyss de Ingeniería de Inspección Biológica de la Universidad Harvard, en Estados Unidos, y fue publicado en 2014 en la revista Science. Para esa prueba, se dispuso de 1.024 microrrobots, cada uno de ellos con pocos centímetros de alto y de ancho, denominados kilobots, fáciles de montar y muy utilizados en experimentos de robótica. Bajo el liderazgo del ingeniero electricista Michael Rubenstein, que actualmente trabaja en la Universidad Northwestern, los investigadores lograron que los robots intercambiaran mensajes –en forma análoga a las hormigas y abejas que se reconocen a lo largo de un camino o en vuelo para intercambiar informaciones– entre ellos por medio de luz infrarroja, formando, con el conjunto de sus cuerpos, imágenes similares a una estrella o a la letra K. Cada robot, de acuerdo con su programación, participó en la construcción de las imágenes solamente con la información transmitida por sus robots vecinos.
“La capacidad de los robots para la resolución de problemas es una posibilidad abierta por el aprendizaje de máquinas, en donde el artefacto se programa para el reconocimiento del ambiente y de todo lo que se encuentra a su alrededor”, explica la licenciada en ciencias de la computación Esther Luna Colombini, docente del Instituto de Computación de la Universidad de Campinas (IC-Unicamp) y presidente, entre 2012 y 2016, de Robocup en Brasil, un proyecto que organiza olimpíadas de robots en todo el mundo. El aprendizaje de máquinas es un sistema informático que les permite a los robots realizar un aprendizaje basándose en modelos y procesar informaciones mediante el registro de experiencias adquiridas. “A grandes rasgos, ellos pueden ‘aprender’ durante la ejecución de una tarea. Hay gran amplitud para una redefinición de lo que los robots harán en cada situación”, explica Terra.
“Ellos son capaces de aprender con escasa información. Cada robot puede identificar una botella de Coca-Cola dentro de una casa, incluso sin que se lo haya programado para reconocerlas. Basta con que busque la imagen en internet para lograr reconocerla”, comenta Luna Colombini, quien también es integrante de la Sociedad de Automatización y Robótica (RA Society) que forma parte de la organización estadounidense del Instituto de Ingenieros Eléctricos y Electrónicos (IEEE). Ella recuerda que en las competencias de robots, principalmente las de fútbol robótico, la tecnología de enjambre normalmente no está presente porque cada jugador está programado para tareas predeterminadas y no para actuar en grupo. “Pueden simularse estrategias de equipo que involucran el comportamiento de los robots y diferentes características de programación para cambiar un esquema táctico durante el desarrollo del juego, aunque esto no es lo usual en esa clase de competencias”.
Los robots de enjambre pueden ser más baratos y sencillos desde un punto de vista estructural que aquéllos que se ven con mayor asiduidad en los medios de comunicación, de aspecto humanoide, con cabeza, tronco, piernas y brazos. Las máquinas de la robótica de enjambres necesitan disponer de varios sensores y deben construirse con base en la misión que van a cumplir. Dependiendo del sitio en que se desempeñen, utilizarán orugas o ruedas multidireccionales para su locomoción o incluso pequeños barcos o drones.

Universidad Harvard
Un experimento en la Universidad Harvard con 1.024 minirrobotsUniversidad HarvardActividad marina
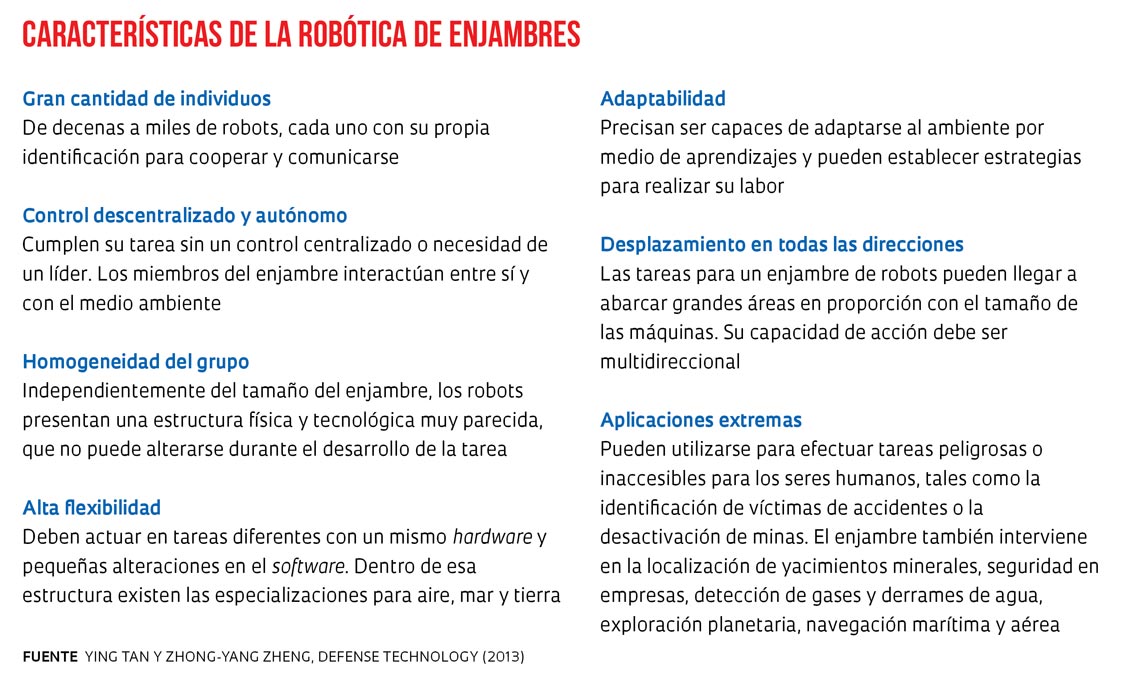
Dos experimentos revelan el potencial de la robótica de enjambres para su uso en ambientes acuáticos. El proyecto Seaswarm, del MIT, prevé vehículos robóticos autónomos de 4,8 metros de largo por 2,1 metros de ancho trabajando en conjunto para extraer petróleo de la superficie del mar, principalmente en estuarios y bahías. Son similares a barcos y se desplazan a expensas de la energía solar, generada por paneles fotovoltaicos dispuestos en la parte superior del robot. Así, pueden quedarse varios días en el mar sin necesidad de tocar tierra. Una cinta transportadora en la parte trasera del robot recoge el petróleo en la superficie. Cuando la cinta se desplaza hacia la parte delantera del robot, el petróleo se suelta y queda almacenado allí hasta que el vehículo vuelve a tierra o le entrega su carga a un barco de acopio en tránsito. Este proyecto, presentado en 2010, todavía no se ha transformado en un producto comercial.
En Portugal, científicos del Instituto Universitario de Lisboa (ISCTE-IUL) y de otras instituciones llevaron a cabo un experimento con pequeños barcos de 60 centímetros de longitud con instrumental a bordo para estudiar cómo pueden operar los sistemas de robótica de enjambres en condiciones reales. Se utilizaron 10 barcos robots, cada uno con un costo de 300 euros, en un lago donde desembocan las aguas del río Tajo, en Lisboa. En un artículo publicado en la revista PLOS ONE, en 2016, ellos muestran el desarrollo de los sistemas de control para cuatro tareas colectivas que realizaron los robots acuáticos: localización, agrupamiento, dispersión y monitoreo del área. Cada una de esas faenas fue testeada por separado para comprobar la robustez del sistema de algoritmos elaborado por los investigadores. El objetivo de este sistema es el empleo de este enjambre de robots en servicios de monitoreo ambiental y vigilancia.
El gran reto actual de la robótica de enjambres es el perfeccionamiento de los sistemas de comportamiento de los robots. “Se necesita estudiar la comunicación que ellos intercambian entre sí mediante señales infrarrojas, wifi, Bluetooth u ondas de radio para que puedan cumplir una labor específica”, dice Nadia Nedjah, docente de la Facultad de Ingeniería de la Universidad del Estado de Río de Janeiro (Uerj).
MIT
Simulación por computadora en el MIT de robots acuáticos realizando tareas de limpieza en el marMIT“Realizamos investigación básica, donde reproducimos, en la computadora, clústeres con 40 a 70 individuos que se agrupan, pero en principio no se conocen. Uno de los experimentos consiste en trasponer obstáculos formando triángulos con tres robots. Éstos deben movilizarse en forma conjunta de manera similar a una bandada de aves en vuelo, algo que depende de la comunicación entre ellos. Según la información disponible, toman decisiones de acuerdo con los requerimientos de la tarea solicitada y del grupo”, explica Nedjah. En el marco de un estudio que finalizó en 2016 y posteriormente fue publicado en la revista International Journal Of Bio-Inspired Computation, la investigadora analizó un algoritmo, desarrollado por el grupo, para aquellas eventualidades en donde un robot necesita de la colaboración de otros para ejecutar una tarea. Este sistema, que se denomina algoritmo de onda, establece un proceso de reclutamiento por medio de la propagación de mensajes transmitidos por señal infrarroja entre robots vecinos hasta comprobar cuáles son aquellos que pueden ayudar. “”Tanto la tecnología de hardware como la de software ya existe, pero todo se encuentra aún en fase experimental”, dice Nedjah.
En el InSac, que aglutina a más de seis universidades y tres institutos de investigación brasileños, uno de los temas de estudio es la robótica de enjambres en el segmento de la agricultura. “Estamos estudiando su uso para la fumigación de cultivos. En este sistema cada dron conoce el área que pulverizó. En el caso de que uno de ellos se haya quedado sin insumo o afronte problemas técnicos, habrá otros que realizarán el trabajo en su lugar, sin necesidad de un monitoreo humano”, explica Terra. “La robótica de enjambres aún tiene mucho desarrollo por delante y Brasil reúne las condiciones para disputar pequeños nichos que van surgiendo en esa área, como en el caso de la agricultura”.
El ingeniero Terra recuerda incluso que la evolución de la robótica también involucra a los vehículos autónomos, que podrán funcionar como un enjambre. “Cuando haya muchos de ellos en la calle, necesitarán intercambiar información entre sí para tomar decisiones. Por ejemplo, en un cruce sin semáforos, tendrán que decidir quién pasa primero con seguridad valiéndose de sensores y algoritmos provistos por los sistemas de computación embebida”, analiza.
Proyecto
INCT 2014 – Instituto Nacional de Ciencia y Tecnología para sistemas autónomos cooperativos aplicados en seguridad y medio ambiente (nº 14/50851-0); Modalidad Proyecto Temático; Programa INCT; Investigador responsable Marco Henrique Terra (USP); Inversión R$ 2.234.701,20
Artículo científico
SILVA JÚNIOR, L. D. R. S. e NEDJAH, N. Distributed strategy for robots recruitment in swarm-based systems. International Journal of Bio-Inspired Computation. Publicado online el 4 de mayo de 2016.