En algunas ciudades de Estados Unidos, Asia y Europa, ya circulan vehículos equipados con sistemas avanzados de conducción autónoma. En China, la empresa tecnológica Baidu, propietaria de la aplicación de movilidad urbana Apollo Go, y la startup AutoX, vinculada al conglomerado Alibaba, ofrecen servicios experimentales de taxis robóticos en algunos de los principales centros urbanos del país, tales como Pekín, Shanghái y Shenzhen. Con todo, los vehículos autónomos disponibles hoy en día se enmarcan en un escenario limitante: dependen de un chofer de seguridad a bordo, que asuma el control del volante en situaciones de riesgo; o bien solamente se desplazan a baja velocidad, entre 40 y 50 kilómetros por hora (km/h) aproximadamente, por circuitos cerrados, con obstáculos y riesgos mapeados con antelación.
No existen todavía automóviles totalmente automatizados, capaces de circular en forma segura por diversas rutas sin intervención humana. “Los coches autónomos que interactúan con la infraestructura de las ciudades generando mejoras en el tránsito, confort y seguridad a los usuarios y a los peatones constituyen el futuro de la movilidad, pero esta transformación aún va a tardar 20 o 30 años para hacerse realidad”, dice el científico de la computación Fabio Kon, del Departamento de Ciencias de la Computación del Instituto de Matemática y Estadística de la Universidad de São Paulo (IME-USP).
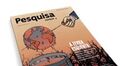
Los vehículos se clasifican en cinco niveles de autonomía (véase la infografía), de acuerdo con una escala diseñada por SAE International, entidad que congrega a científicos y expertos en ingeniería automotriz. El funcionamiento de estos coches depende de un conjunto de sistemas, entre los cuales se cuentan sensores de observación del entorno que detectan la presencia de peatones, ciclistas, objetos u otros vehículos en circulación o en las proximidades, y herramientas de inteligencia artificial para interpretar la información recabada y transformarla en acciones, tales como el control de la velocidad, el frenado o el ingreso y egreso de los carriles de circulación. También necesitan navegadores electrónicos, como el Sistema de Posicionamiento Global (GPS), para planificar y trazar los recorridos.
“Disponemos de los sistemas necesarios para la autonomía vehicular, pero aún debemos perfeccionar bastante la capacidad de los sensores para recabar información de calidad y la inteligencia artificial para interpretar esos datos”, apunta el científico de la computación Fernando Osório, del Instituto de Ciencias Matemáticas y Computación (ICMC) de la USP, campus de São Carlos. Los centros de investigación públicos y privados de varios países están abocados al diseño de las soluciones necesarias para superar estos retos.
En Brasil, una de las principales iniciativas en curso es la del grupo de trabajo formado en 2021 en torno al Proyecto y Desarrollo Integrado de Funciones de Seguridad Asistida para el Conductor y el Ambiente en Vehículos Autónomos (SegurAuto). El equipo reúne a investigadores de la USP, de las universidades Tecnológica Federal de Paraná (UTFPR), de Brasilia (UnB), Federal de Pernambuco (UFPE) y de las empresas BMW, Stellantis (resultado de la fusión de la ítaloestadounidense Fiat Chrysler y el Groupe PSA francés), Renault, Mercedes Benz, Bosch, AVL, DAF Trucks Brazil y Vector Informatik.
“El concepto de trabajo en SegurAuto es el desarrollo de sistemas avanzados de asistencia a la conducción, que se van incorporando gradualmente a los vehículos hasta culminar en la plena autonomía”, explica el ingeniero mecánico Evandro Leonardo Silva Teixeira, de la carrera de grado en ingeniería automotriz de la UnB. Algunos ejemplos de estas innovaciones incorporadas por los fabricantes de automóviles son el control electrónico de estabilidad del vehículo, los sistemas de estacionamiento automático y el control de crucero adaptativo, que permite predeterminar la velocidad y la distancia límite con el vehículo precedente.

Hou Yu / China News Service via Getty ImagesUn robotaxi en la ciudad china de Pekín: autonomía limitadaHou Yu / China News Service via Getty Images
Sensores Combinados
Una de las propuestas en marcha del equipo de SegurAuto es la combinación de dos tipos de sensores para realizar la lectura del ambiente en el cual se encuentran inmersos los vehículos. En este caso radares, que utilizan ondas de radio para captar la presencia de elementos, y la visión computarizada o artificial, que emplea cámaras de video. Según Osório, coordinador del grupo de la USP de São Carlos en SEgurAuto, el radar, en la mayoría de las situaciones, es capaz de detectar obstáculos imprevistos. “Si alguien se encuentra de frente con un camión, el dispositivo lo detecta de inmediato y permite activar instantáneamente un comando para frenar el vehículo”, describe. Sin embargo, explica, no siempre es capaz de reconocer los matices y posee una percepción meramente aproximada de las características de los obstáculos.
La visión por computadora es más precisa. Además de detectar y detallar los obstáculos y elementos próximos a la calzada, permite la lectura de las señales de tránsito y reconoce las sendas peatonales y los carriles de circulación. El problema reside en que las situaciones adversas, tales como la niebla, la lluvia, el polvo, los faros en sentido contrario y las luces de los vehículos de emergencia y seguridad dificultan la visibilidad de las cámaras de video.
Los automóviles de la automotriz estadounidense Tesla, que solo utilizan sensores de visión por computadora, constituyen un ejemplo de las limitaciones del sistema. Ya se han visto involucrados en más de una docena de accidentes. En varios de ellos, el sensor no fue capaz de distinguir las luces de emergencia de vehículos detenidos en la calzada y el Tesla atropelló a los socorristas.
“Ningún sensor por sí solo es totalmente eficaz. Por esa razón, la mejor solución será la combinación de tecnologías”, sopesa Osório. Según el investigador, hasta el más eficaz de los sensores, el Lidar (detección de luz y cálculo de distancias), que emplea haces de luz láser para medir la distancia con los objetos y mapear el entorno, se ve limitado por su escaso alcance, de 150 metros (m), lo que obliga a recurrir a una combinación de sensores.
Además, el Lidar requiere de mecanismos de alta precisión y el apoyo de unidades de procesamiento de alto desempeño, lo que supone un costo operativo que la mayoría de los fabricantes considera prohibitivo. La principal entusiasta de la tecnología en la industria de los vehículos autónomos, la compañía estadounidense Waymo, perteneciente al grupo Alphabet, el mismo que controla Google, en 2021 desistió de venderles a otras empresas las soluciones Lidar y ahora está diseñando una nueva generación más eficiente y de menor costo.
La combinación de radares con la visión artificial propuesta por el equipo de SegurAuto ha demostrado su eficacia operativa, informa Osório, pero debe mejorarse el rendimiento de cada uno de los sensores. “Se necesita poder ver más lejos y con mayor antelación”, subraya. Un sobrepaso a 80 km/h requiere poder anticiparse a situaciones que se encuentran a 1 km de distancia. “Un radar común tiene un alcance de 300 m, una cámara de video alcanza una distancia mayor, pero la información obtenida es imprecisa. Se necesita una alta capacidad de procesamiento de datos y la obtención de los resultados es lenta”, describe el investigador.
La detección de obstáculos lejanos es tan solo la primera etapa del proceso. También hay que determinar el sentido de desplazamiento del objeto identificado, la velocidad a la que se mueve y prever si hay riesgo de colisión o no. Para ello, es necesario que los sistemas de inteligencia artificial perfeccionen su capacidad de interpretación de escenarios.
El avance de las telecomunicaciones y de internet de las cosas (IoT) puede contribuir para generar una mayor seguridad vehicular. Es posible, por ejemplo, anticipar escenarios de peligro, como en el caso de dos coches llegando al mismo tiempo a un cruce donde el campo de visión es limitado. “La comunicación entre los vehículos o entre los vehículos y los teléfonos móviles de los peatones, los radares o las cámaras de seguridad, pueden generar información de manera anticipada”, dice el científico de la computación Abel Guilhermino da Silva Filho, quien dirige el Laboratorio de Innovación Vehicular (Live) del Centro de Informática de la UFPE.
Las redes de comunicación Vehicle to Everything (V2X) y Cellular Vehicle to Everything (C-V2X), es decir, vehículos conectados que reciben y emiten señales a otros vehículos, a los teléfonos móviles de los peatones y a la infraestructura urbana constituida por los semáforos, radares, cámaras de seguridad de edificios, etc., son objeto de investigación de la UFPE en el SegurAuto.

LUMEe.coTech 4: el primer vehículo autónomo comercial fabricado en el Brasil, lanzado hace dos añosLUME
El grupo coordinado por Silva Filho realizó un estudio de caso con base en un convoy, una situación habitual en el transporte de cargas, en la que las decisiones del vehículo que marcha al frente del grupo –acelerar, frenar, detenerse o cambiar de recorrido– se transmiten al resto. La información anticipada por el líder proporciona mayor seguridad operativa y ahorro de combustible al convoy. Además, tan solo el vehículo que marcha al frente requeriría de la presencia de un humano para intervenir en situaciones de riesgo. “Estamos abocados a establecer cuál es el mejor protocolo de comunicación, el tiempo en el que debe producirse la comunicación intervehicular y el plazo necesario para una reacción segura”, precisa el investigador.
El equipo de la UnB, encabezado por Teixeira, y el de la Escuela Politécnica (Poli) de la USP, coordinado por el físico João Francisco Justo Filho, están a cargo del desarrollo de un software capaz de transformar la información recabada por los sensores en decisiones y acciones efectivas en los vehículos. Los investigadores de la UnB se dedican a las soluciones para el control y comando de la conducción y el frenado predictivo, mientras que los de la Poli-USP trabajan con los sistemas de motorización y frenos.
Otro grupo de investigación nacional se articula en torno al programa del Instituto Nacional de Ciencia y Tecnología para Sistemas Autónomos Cooperativos (InSAC), que cuenta con el apoyo de la FAPESP, y un historial de contribuciones desde 2009, cuando se llamaba INCT SEC (Sistemas Empotrados Críticos).
El programa apoyó el proyecto Coche Robótico Inteligente de Navegación Autónoma (Carina), el primer vehículo autónomo brasileño que transitó de manera asistida por las calles de una ciudad brasileña, en esa ocasión, São Carlos, en 2013, el primer camión autónomo de América Latina y la primera máquina agrícola nacional (lea en Pesquisa FAPESP, ediciones nº 213, 235 y 271, respectivamente). Todos los trabajos fueron desarrollados por el grupo del Laboratorio de Robótica Móvil del ICMC-USP. El Laboratorio de Sistemas Inteligentes de la Escuela de Ingeniería de São Carlos de la USP (Eesc-USP) colaboró en el desarrollo del Carina y del camión autónomo.
En 2019, un equipo integrado por seis estudiantes de posgrado del ICMC, coordinado por los profesores Denis Wolf y Osório, diseñó un vehículo autónomo virtual y resultó ganador del Desafío de Conducción Autónoma Car Learning to Act (Carla), una competencia organizada por los principales fabricantes y desarrolladores de la tecnología de conducción autónoma. En ese certamen compitieron 69 equipos de los más prestigiosos institutos educativos de todo el mundo.
En el ámbito del InSAC, hubo un aporte reciente en el área de la visión computarizada realizada por el equipo del ingeniero mecánico Valdir Grassi Junior, del Departamento de Ingeniería Eléctrica y de Computación (SEL) de la Eesc-USP. Se trata del desarrollo de un método para detectar la profundidad del ambiente a partir de la imagen suministrada por una sola cámara embutida en el vehículo. En otras palabras, a partir de una imagen, el software calcula la distancia entre los objetos y el vehículo. El resultado de ese trabajo salió publicado en la revista Robotics and Autonomous Systems, en 2021.
“A semejanza de los seres humanos, la visión artificial utiliza tradicionalmente dos cámaras de video para determinar la profundidad. Cuando una persona pierde la visión de un ojo, al cerebro le lleva un tiempo adaptarse a la percepción de profundidad monocular. Un vehículo debe poder seguir viaje con seguridad en caso de que falle una cámara. De ahí la necesidad de crear algoritmos entrenados para esta eventualidad”, argumenta Grassi.
El ingeniero electricista Marco Henrique Terra, del SEL-Eesc y coordinador del InSAC, informa que se encuentran en fase avanzada las negociaciones con un fabricante de camiones para el desarrollo de un proyecto de vehículos pesados autónomos que operen en ambientes críticos en los sectores de la agricultura y la minería. “Estas son dos grandes áreas de interés para las multinacionales cuando piensan en realizar inversiones en Brasil”, dice Terra.
En 2017, el proyecto Iara (Intelligent Autonomous Robotic Automobile) del Laboratorio de Computación de Alto Rendimiento de la Universidad Federal de Espírito Santo (LCAD-Ufes), marcó un hito en la investigación brasileña al realizar un viaje asistido de 74 km entre el campus de la Ufes, en Vitória, y la localidad vecina de Guarapari. Parte de los participantes en este proyecto crearon en 2019 la startup Lume Robotics. Hace dos años, asociada con el fabricante de vehículos eléctricos Hitech Electric, del estado de Paraná, lanzó al mercado el primer coche autónomo comercial de fabricación nacional. El vehículo, denominado e.coTech 4, está equipado con sensores Lidar, cámaras de video y GPS, y se encuadra en el nivel 4 de autonomía, lo que significa que se desplaza sin conductor por zonas mapeadas previamente.
“Esperamos poder satisfacer las demandas de transporte corporativo, para el desplazamiento de personas, por ejemplo, en las grandes plantas industriales”, dice Rânik Guidolini, socio fundador de Lume Robotics. Está previsto para antes de finalizar 2022 el comienzo de las pruebas de un camión autónomo, también pensado para operar en complejos industriales. “Tenemos programados cinco proyectos piloto. Confiamos en poder suscribir los primeros contratos este mismo año”, estima Guidolini.
Una Avenida Paulista Sin Conductores
Un estudio simuló cómo se comportaría la vía más famosa de la ciudad de São Paulo con carriles exclusivos para vehículos totalmente autónomos
Questtonó ManyoneImagen ilustrativa de una avenida con uno de sus carriles dedicado a los vehículos autónomosQuesttonó Manyone
Una de las expectativas predominantes entre ingenieros, expertos del tránsito y asesores de la industria automotriz supone que los vehículos autónomos van a acelerar una tendencia ya en curso en las grandes metrópolis europeas, de desapego del automóvil como objeto de propiedad privada. Esta tendencia es el resultado de la intervención de dos fuerzas. Por un lado, la incorporación cada vez más acentuada de tecnologías y sistemas de automatización avanzada que encarece los vehículos, lo que los hace prohibitivos para la gran mayoría de la población. Y por el otro está el avance de los servicios por aplicación, que ofrecen vehículos a pedido, en los cuales el usuario no necesita invertir un gran capital ni cargar con los gastos de mantenimiento, impuestos y seguro.
“El automóvil será solamente una infraestructura a la que se accederá a pedido”, supone el científico de la computación Fabio Kon, del IME-USP. A su juicio, esta nueva realidad ofrecerá ventajas, tales como una mejora de la movilidad urbana y la seguridad vial, se reducirán drásticamente los accidentes y se liberarán para fines urbanísticos grandes espacios en zonas privilegiadas que actualmente se destinan al estacionamiento.
Un estudio realizado por Kon y su equipo en el ámbito del Instituto Nacional de Ciencia y Tecnología de Internet del Futuro para Ciudades Inteligentes (InterSCity), con el apoyo de la FAPESP, simuló cómo sería la avenida Paulista, en la capital del estado de São Paulo, si fuera transitada solamente por vehículos autónomos. Los resultados salieron publicados en febrero del año pasado en la revista científica Simulation Modelling Practice and Theory.
La avenida Paulista, situada en el límite entre las zonas sur, central y el oeste de la ciudad de São Paulo, posee cuatro carriles en cada sentido de circulación y está permanentemente congestionada en los horarios pico. En un futuro dominado por los coches autónomos a pedido, podría habilitar solamente un carril para el tránsito por destino y sería capaz de atender al mismo número de usuarios que hoy en día se desplazan en un transporte individual.
“Se la va a poder cruzar mucho más rápido. Se podrán constituir flotas de vehículos autónomos y controlar los semáforos en sintonía con el paso de esos convoyes”, explica Kon. No obstante, el investigador advierte que la mera sustitución de los vehículos particulares conducidos por personas por vehículos autónomos solamente generará beneficios modestos en el tránsito.
La Responsabilidad De Los Accidentes
En Brasil, como en la mayoría de los países, una prueba con un vehículo autónomo en las calles y carreteras requiere de una habilitación previa de las autoridades de tránsito. En el mundo occidental, tan solo Alemania, desde el mes de febrero, y algunos estados de Estados Unidos poseen una legislación específica para autorizar la circulación de vehículos autónomos con el respaldo de conductores de emergencia. Uno de los problemas que aún se está lejos de resolverse, incluso en Alemania y Estados Unidos, se refiere a la responsabilidad en caso de accidentes. ¿Quién será el imputado: el propietario del vehículo, o el conductor asistente, quien no se hizo cargo de la dirección en caso de emergencia, o el fabricante del vehículo, o también, el proveedor de la tecnología que falló?
Para el ingeniero civil Edvaldo Simões da Fonseca Junior, del Departamento de Ingeniería de Transportes de la Escuela Politécnica de la USP, la tendencia indica que las leyes para los vehículos autónomos seguirán las que hoy en día se encuentran en vigencia para la aviación civil. En el caso de un accidente aéreo, la responsabilidad recae, en primera instancia, en la compañía de aviación. En el caso de los automóviles, el propietario, que a menudo será una empresa que prestará el servicio de movilidad urbana o de transporte de cargas, sería el responsable.
En una instancia posterior, tras dar por finalizada la investigación de la causa del accidente, la culpa recaería sobre quien generó la falla: el prestador de servicios, el fabricante o el proveedor de tecnología. Para ello, los vehículos tendrán que disponer de un sistema de registro de datos siguiendo el modelo de las cajas negras de los aviones. “Además, puede que en el futuro, los organismos que regulan el tránsito exijan a los fabricantes de vehículos autónomos que estos cuenten con sensores redundantes, para disminuir el riesgo de fallas”, resalta Fonseca.
Proyectos
1. INCT 2014. Instituto Nacional de Ciencia y Tecnología para Sistemas Autónomos Cooperativos Aplicados en Seguridad y Medio Ambiente (nº 14/50851-0); Modalidad Proyecto Temático; Investigador responsable Marco Henrique Terra (USP); Inversión R$ 3.882.876
2. INCT 2014. Internet del Futuro (nº 14/50937-1); Modalidad Proyecto Temático; Investigador responsable Fabio Kon (USP); Inversión R$ 1.805.100,01
3. Internet del futuro aplicada a ciudades inteligentes (nº 15/24485-9); Modalidad Proyecto Temático; Investigador responsable Fabio Kon (USP); Inversión R$ 1.561.650,22
4. Proyecto Carina. Vehículo Robótico Inteligente de Navegación Autónoma (n° 11/10660-2); Modalidad Ayuda de Investigación – Regular; Investigador responsable Denis Wolf (USP); Inversión R$ 60.700,15
5. Proyecto Carina. Localización y Control (nº 13/24542-7); Modalidad Ayuda de Investigación – Regular; Investigador responsable Denis Wolf (USP); Inversión R$ 82.334,60
6. Instituto Nacional de Ciencia y Tecnología de Sistemas Empotrados Críticos (INCT-SEC) (n° 08/57870-9); Modalidad Proyecto Temático; Investigador responsable José Carlos Maldonado (USP); Inversión R$ 1.734.565,96
Artículos científicos
MENDES, R.Q. et al. On deep learning techniques to boost monocular depth estimation for autonomous navigation. Robotics and Autonomous Systems. v. 136, 103701. feb. 2021.
SANTANA, E.F.Z. et al. Transitioning to a driverless city: evaluating a hybrid system for autonomous and non-autonomous vehicles. Simulation Modelling Practice and Theory. v. 107, 102210. feb. 2021.
Republicar